Home position return parameter mitsubishi servo motor
Home position return parameter mitsubishi servo motor
When performing home position return, set parameter No.8 as follows:
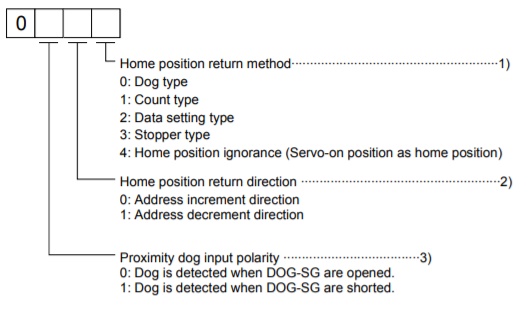
1) Choose the home position return method.
2) Choose the starting direction of home position return. Set “0” to start home position return in the direction in which the address is incremented from the current position, or “1” to start home position return in the direction in which the address is decremented.
3) Choose the polarity at which the proximity dog is detected. Set “0” to detect the dog when the proximity dog device (across DOG-SG) is opened, or “1” to detect the dog when the device is shorted.
(3) Instructions
1) Before starting home position return, always make sure that the limit switch operates.
2) Confirm the home position return direction. Incorrect setting will cause the machine to run reversely.
3) Confirm the proximity dog input polarity. Otherwise, misoperation can occur.















