Dog type home position return of mitsubishi servo motor
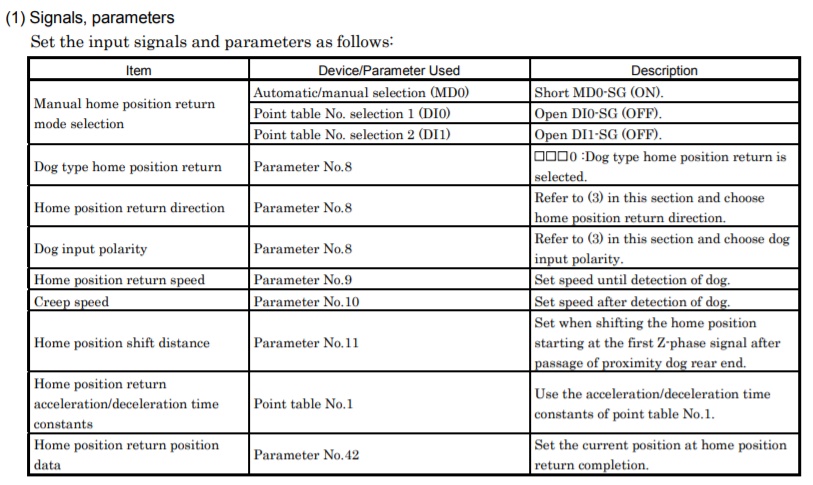
Dog type home position return of mitsubishi servo motor
A home position return method using a proximity dog. With deceleration started at the front end of the proximity dog, the position where the first Z-phase signal is given past the rear end of the dog or a motion has been made over the home position shift distance starting from the Z-phase signal is defined as a home position
(2) Length of proximity dog
To ensure that the Z-phase signal of the servo motor is generated during detection of the proximity dog (DOG), the proximity dog should have the length which satisfies formulas (4.2) and (4.3):
L1 60
V
2
td …………………………………………………………………… (4.2)
L1 : Proximity dog length [mm]
V : Home position return speed [mm/min]
td : Deceleration time [s]
L2 2 S………………………………………………………………………… (4.3)
L2 : Proximity dog length [mm]
S : Moving distance per servo motor revolution [mm]